0.Syringe pump 설명
시린지 펌프는 주사기를 통해 정확한 양의 유체를 공급하는 모터 구동식 정밀 펌프입니다.
보통 병원에서 약물의 전달 속도를 미세하게 조절하기 위해 사용됩니다.

시린지 펌프는 주입과 흡입의 비교적 간단한 메커니즘으로 작동합니다. 펌프의 본체 안에 위치한 스텝모터가 주사기펌프가 설치되는 렉과 연결되어 있어 스텝모터의 회전운동이 시린지펌프의 직선운동으로 바뀌게 됩니다.
모터의 회전 방향에 따라 주입(Infusion), 흡입(Withdraw)으로 동작합니다.
식물의 물관 흐름 센서 실험중 필요한 장비였으나 가격이 너무 비싸서 간단하게 만들어 보겠습니다.

재료 : 아두이노 우노, 스텝모터(28BYJ-48), 모터 드라이버( ULN2003 )
시린지 펌프의 flow rate 계산법은
Flow Rate = πr² x d(이동거리)
r=시린지 반지름
내경이 15mm인 실린지에서 이동거리가 5mm라면
Flow Rate은 15^2*5 [㎣]=1125 [㎣]=1.125 [㎖]입니다.
시린지 펌프는 스텝 모터의 resolution에 따라 유량 속도가 정해지기 때문에 미세 유량을 조절하기 위해서는 스텝모터의 resolution이 중요합니다.

스텝 모터의 원리는 pulse가 입력될 때마다, 일정한 각도씩 모터가 회전하도록 제어됩니다.
이때 회전각은 스텝각이라고 부릅니다.
스텝각을 작게 하면 모터의 위치를 결정하는 정밀도를 향상할 수 있습니다.
또 알아야 할 점은 펄스 속도입니다. 펄스 속도를 빠르게 하면 스테핑 모터의 회전속도가 빨라집니다.
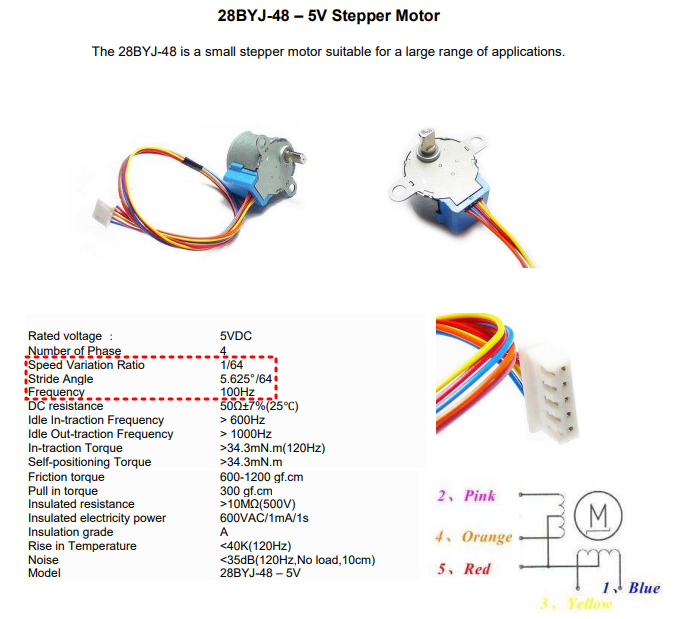
Stride Angle를 보면 5.625도만큼 64회 동작하면 360도(1회전)합니다.
그리고 Speed Variation Ratio (분주율)이 1/64인데 실제 모터가 동작할 때 5.625도가 64로 나눠서 동작한다는 뜻입니다.
즉 모터가 한 바퀴 회전하기 위해서는 360/5.625*64인 4096 동작이 필요합니다.
resolution은 0.08789도입니다.

모터드라이버는 모터에 안정적인 전원을 공급하고 모터의 회전방향을 제어하기 위해 필요합니다.

스텝모터와 모터드라이버의 회로입니다.
28BYJ-48 스텝모터는 5 wire 유니폴라 타입으로 코일 1-3, 2-4가 한 세트입니다.

코일에 전류를 흘러주는 방식에 따라 안의 로터가 순차적으로 회전합니다. 이때 순차적으로 전류를 흘러주는 방식(sequence)은 3종류가 있습니다. 28BYJ-48는 위 테이블처럼 동작하는 half step 방식입니다.
1. 회로& 코드
Stepper 라이브러리는 스텝 모터를 제어하기 위해 아래의 4가지 함수들을 제공합니다.
- Stepper(steps, pin1, pin2) : 2핀 사용 스텝모터 클래스의 객체를 생성 - 초기화
- Stepper(steps, pin1, pin2, pin3, pin4) : 4핀 사용 스텝모터 클래스의 객체를 생성 - 초기화
- setSpeed(rpm) : Rotations Per Minute(RPM) 단위의 스텝 속도 설정
- step(Steps) : 회전할 스텝 수 입력
버튼으로 주입, 흡입 스텝모터 동작 제어 회로 구성했습니다.


2. 3D 프린팅 외관 디자인


후처리 후 조립합니다.
3. 작동확인
10ml 실린지 기준 스텝 모터 스피드를 RPM 1일때
10ml 주입 시간이 180초 입니다.
초당 55μl 주입이 가능합니다.